
If you read our previous update, you know that we are developing a low-cost automated animal detection system to help reduce human-wildlife conflict. But in case you missed it, here’s a summary.
The Arribada Initiative was one of two winners of the WWF and WILDLABS Human Wildlife Conflict Challenge and was challenged to use technology to reduce conflict between polar bears, elephants and tigers and surrounding communities.
Our idea is to use recent advances in small, low cost infrared sensors capable of creating a picture of an animal’s heat signature to detect and identify a target species, such as a polar bear as a garbage dump. There are advantages to using thermal pictures over traditional optical pictures, such as detecting animals at night, which you can read more about in our introductory blog. Once an animal has been detected by the sensor, a computer algorithm will be trained to send an alert to the community when the target species is identified. It is important that this system works in real time, is cost-effective and easy to maintain.
These blog updates are meant to chronicle our failures, successes and what we learned along the way as we try to develop this unique thermal based alert system.
Types of Thermal Sensors
In our previous blog post, we described a type of infrared sensor called a thermopile and set off to gather some initial thermal pictures and video of our target animals in zoos. We also purchased a different type of thermal sensor known as a microbolometer to test alongside the thermopile sensor and compare their performance. Both sensors have a similar cost and pixel resolution, but we wanted to see if the different types of sensors would produce a significant difference in image quality.

Heimann HTPA32x322.1/0.8F5.0 Thermopile Sensor Resolution: 32 x 32 pixels
Heimann HTPA80x64L5.0/F1.0 Thermopile Sensor Resolution: 80 x 64 pixels
Purchased through Heimann with an infrared sensor, lens, computer board and casing.

FLIR Lepton 2.5 Microbolometer Sensor
Resolution: 80 x 60 pixels
Purchased through Group Gets with an infrared sensor, lens and computer board.
Choosing Our Thermal Sensor
We began by comparing the image produced by each sensor of a human standing at various distances from each sensor in the room with a consistent, cool background temperature.
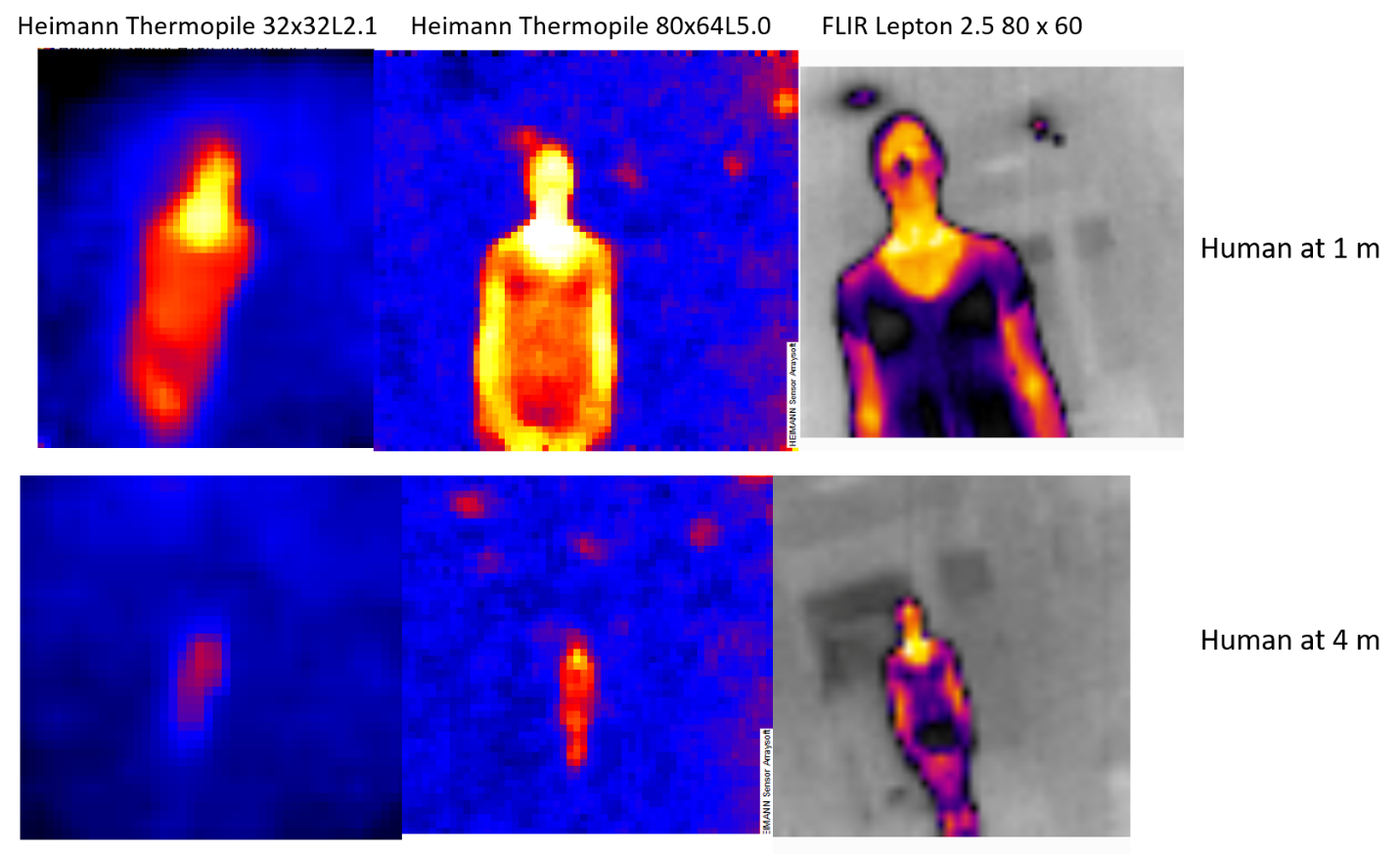
It was immediately apparent that the 32 x 32 resolution Thermopile would not be able to produce the image quality needed to identify a certain animal. We turned our concentration to the 80 x 64 resolution thermopile and the Lepton 2.5 microbolometer. Even with the same resolution, the image quality of the Lepton 2.5 microbolometer looked much better than that of the thermopile. However, we still wanted to test both sensors taking pictures and video of animals, so we headed off to the zoo.
Elephants and Tigers and Polar Bears… Oh My!
Working with the San Diego Zoo and San Diego Safari Park, we were able to capture video of tigers and elephants in their zoo habitats. As seen in the pictures below, the Lepton 2.5 microbolometer outperformed the thermopile sensor. Much more detail is seen in the image of the Tiger using the Lepton 2.5 sensor especially the resolution in the legs tail and head.

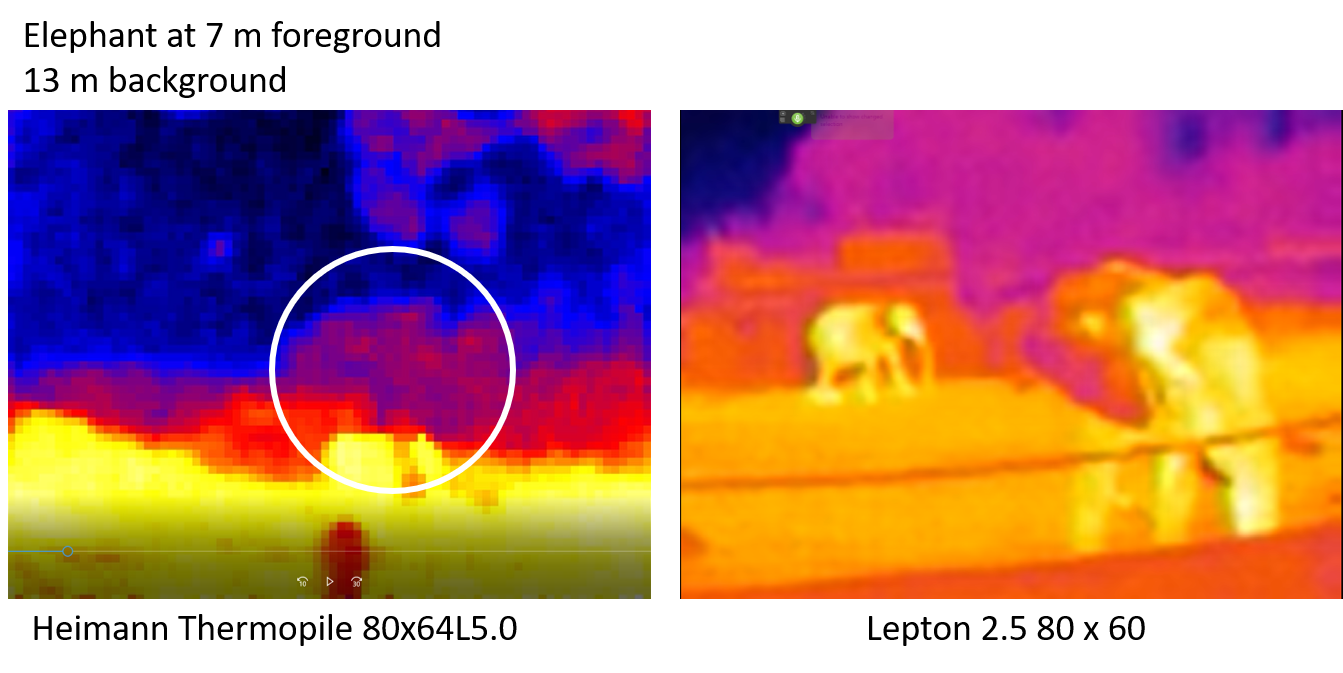
The image quality difference between sensors is particularly apparent in the image of the elephant standing 7 m away from the sensor. The image from the thermopile looks like noise, with no apparent shape, even though the elephant is standing 7 m from the sensor within the white circle on the image. Contrastingly, with the Lepton 2.5 microbolometer, you can clearly see the elephant standing 7 m away and even an elephant walking in the background about 13 m away from the sensor.
We used the Lepton 2.5 microbolometer to image a polar bear, our most challenging animal. Polar bears are very well insulated, which means they don’t radiate a lot of heat for the sensor to detect. Because of this, it is important to have good image quality and temperature sensitivity when trying to detect polar bear since their radiating temperature might be very similar, or cooler, then the background temperature.
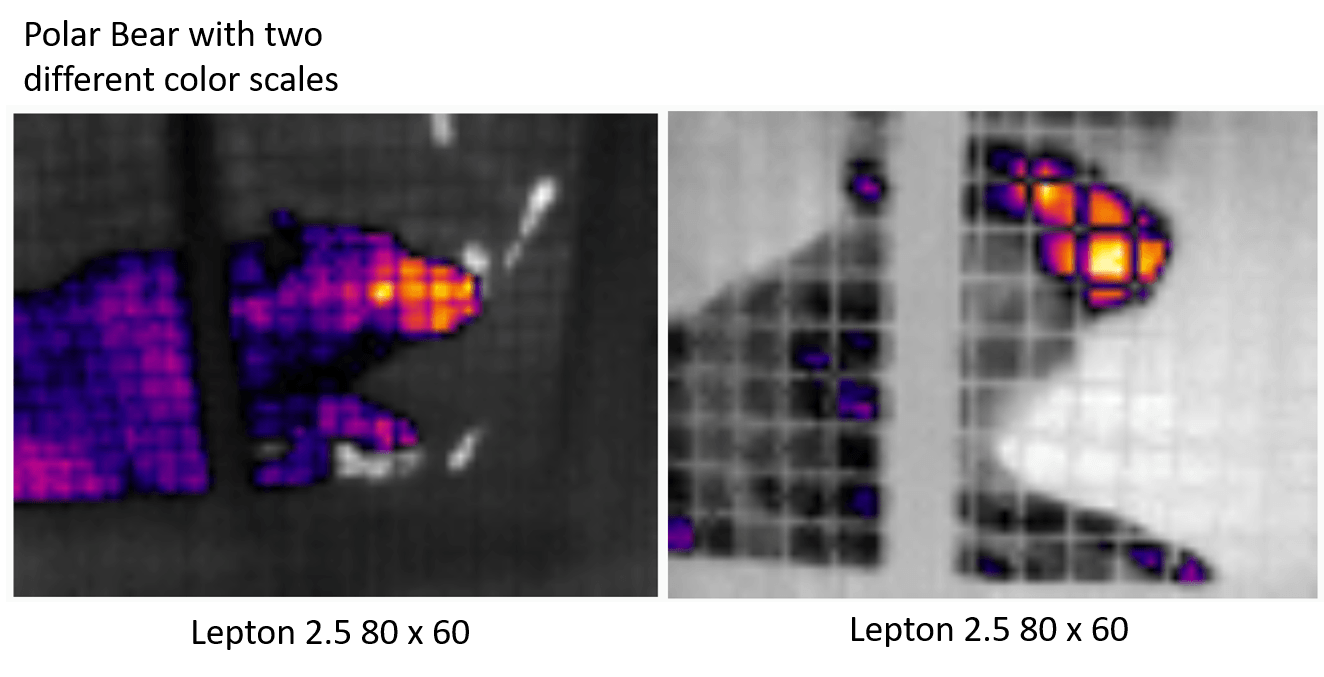
The polar bear in these images is in its indoor sleeping area, where the background is a consistent, cool temperature. This is the best-case scenario for seeing a polar bear thermally. As you can see in these images, the body of the polar bear is well insulated and not giving off much heat. Most of the heat is radiating from its face. We need to gather more video and images of polar bears outdoors, where the background temperature will vary and make it more difficult to detect the polar bear.
Why is the image quality so different?
Talking to an engineer at Heimann, the makers of the thermopile sensor, we believe the image quality is most related to vacuum sealing of the infrared sensor within the device. The Lepton 2.5 thermal sensor is surrounded by a vacuum seal while the sensor in the Thermopile is not. Both sensors measure temperature by converting infrared radiation into heat by measuring the temperature difference across different types of metal in the sensor. If the sensor is not vacuum sealed, much of the heat is lost into the air, which reduces the accuracy and sensitivity of the temperature measurement. This makes the image look “noisy” and reduces its quality. Most microbolometers have a vacuum sealed sensor and therefore better image quality, but future if future updates to thermopile sensors include vacuum sealing, they could rival the image quality of microbolometer’s.
Noise in the image is also affected by the field of view, or how wide and tall of an area the sensor can see. Wider fields of view mean you can scan a larger area, but that larger area introduces more noise and make objects appear further away. The Lepton 2.5 microbolometer center has a narrower field of view the van the thermopile sensor we chose to use. However, the thermopile is available with narrower field of view lenses which could help reduce noise in the image. Finding a balance between an appropriate field of view to monitor that gives the best noise reduction will be important.

What’s Next?
We will keep collecting images and videos of our target animals in zoos to build our database of images and understand how different factors, such as weather and light conditions, will affect our final images. We will continue to test the Heimann 80 x 64 thermopile to understand the limitations of the sensor, as it may be useful in other applications, but given its poorer image quality we will concentrate on microbolometer sensors, such as the Lepton 2.5. We will be collecting more data using DIY-ThermoCam kits which house a FLIR Lepton 2.5 sensor while looking into other manufacturers of microbolometers that offer different signal-to-noise ratios, power consumption and operating temperature ranges. Once we have identified the best sensor for our needs, we will develop our own module using a computer board and power supply.

Because the final vision of our early alert system uses an array of thermal sensors, we will also use zoo habitats to test which array patterns work best for detecting different animals. For example, sensors set up in a line versus across from each other versus vertically stacked. We also hope to use this database of images and video to begin writing the auto recognition algorithm.Arribada Initiative is all about open source design and collaboration, so please let us know if you have any feedback or ideas for improvement. Check back with WILDLABS to keep following us on our journey!

About the Author
Anne Dangerfield is a project manager for the human-wildlife conflict project with the Arribada Initiative, dedicated to affordable, open-source conservation technology solutions.
Related Inventory Content
Organisation
The Arribada Initiative co-develops open, customisable and impact-driven conservation technologies for conservation organisations across the globe.



31 March 2023 2:15pm
Hi Anne!
Interesting with the vaccum seal issue!
When looking at the sensor comparison images, it seems like there is not only a difference in noise (or SNR). The Heimann 80x64 also looks much more pixilated than the FLIR Lepton 80x60 although they have almost exacly the same sensor resolution. Is there a good explanation for this?
Best regards,
Lars
Lars Holst Hansen
Aarhus University